“BING: Binarized Normed Gradients for Objectness Estimation at 300fps” is a an objectness classifier using binarized normed gradient and linear classifier, which is supported by OpenCV library.
Summary
- Goal
- Design a good generic objectness measure method
- Proposed Solution
- Simple idea: collect a few hundred object bounding boxes and a few hundred bounding boxes with random background, and train a linear SVM classifier to predict object vs no-object.
- We observe that generic objects with well-defined closed boundaries share surprisingly strong correlation when looking at the norm of the gradient, after resizing of their corresponding image windows to small fixed size (e.g. 8x8).
- In order to efficiently quantify the objectness of an image window, we resize it to 8x8 and use the norm of the gradients as a simple 64D feature for learning a generic objectness measure in a cascaded SVM framework.
- Contribution
- Propose a simple and powerful feature “BING” to help the search for objects using objectness scores.
- Further show how the binarized version of the NG feature, namely binarized normed gradients (BING) feature, can be used for efficient objectness estimation of image windows, which reauires only a few atomic CPU operations.
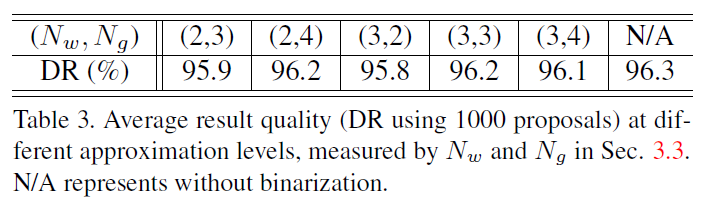
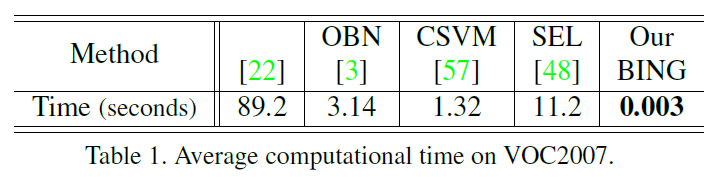
- With the PASCAL VOC2007 dataset, BING efficiently (300fps on a single laptop CPU) generates a small set of data-driven, category-independent, high quality object windows, yielding 96.2% detection rate (DR) with 1,000 windows.
- For the generalization ability, when training BING on 6 object categories and testing on other 14 unseen categories, we observed similar high performance as in standard settings.
BING
- Objectness: a vlaue which reflects how likely an image window covers an object of any category.
- Designing a good generic objectness measure method should:
- achieve high object detection rate (DR), as any undetected objects at this stage cannot be recovered later
- produce a small number of proposals for reducing computational time of subsequent detectors
- obtain high computational efficiency so that the method can be easily involved in various applications, especially for realtime and large-scale applications
- have good generalization ability to unseen object categories, so that the proposals can be reused by many category specific detectors to greatly reduct the computation for each of them
Observation
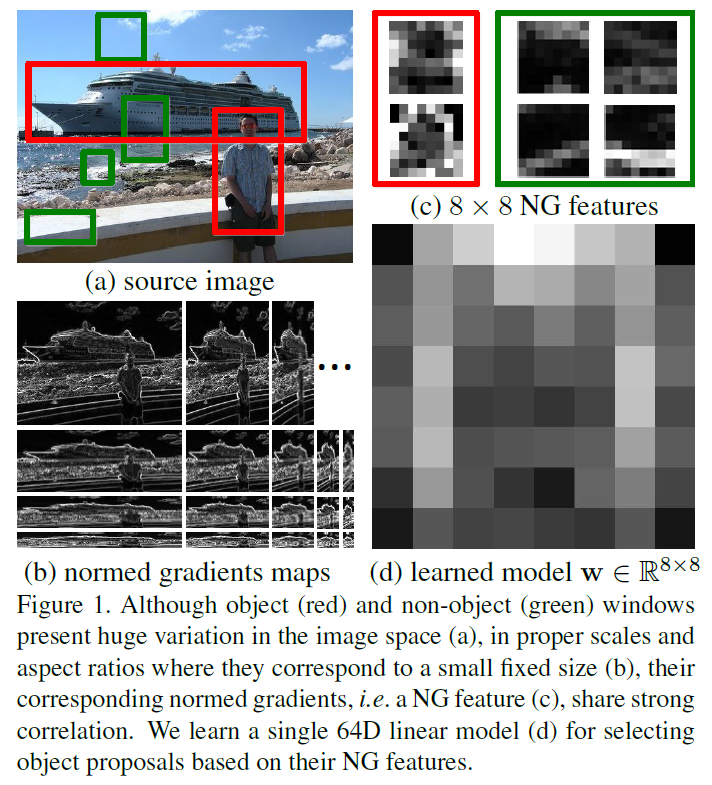
- When resizing windows corresponding to real world objects to a small fixed size, the norm (i.e. magnitude) of the corresponding image gradients gradients becomes a good discriminative feature, because of the little variation that closed boundaries could present in such abstracted view.
- Image gradient is a directional change in the intensity or color in an image.
Learning objectness measurement
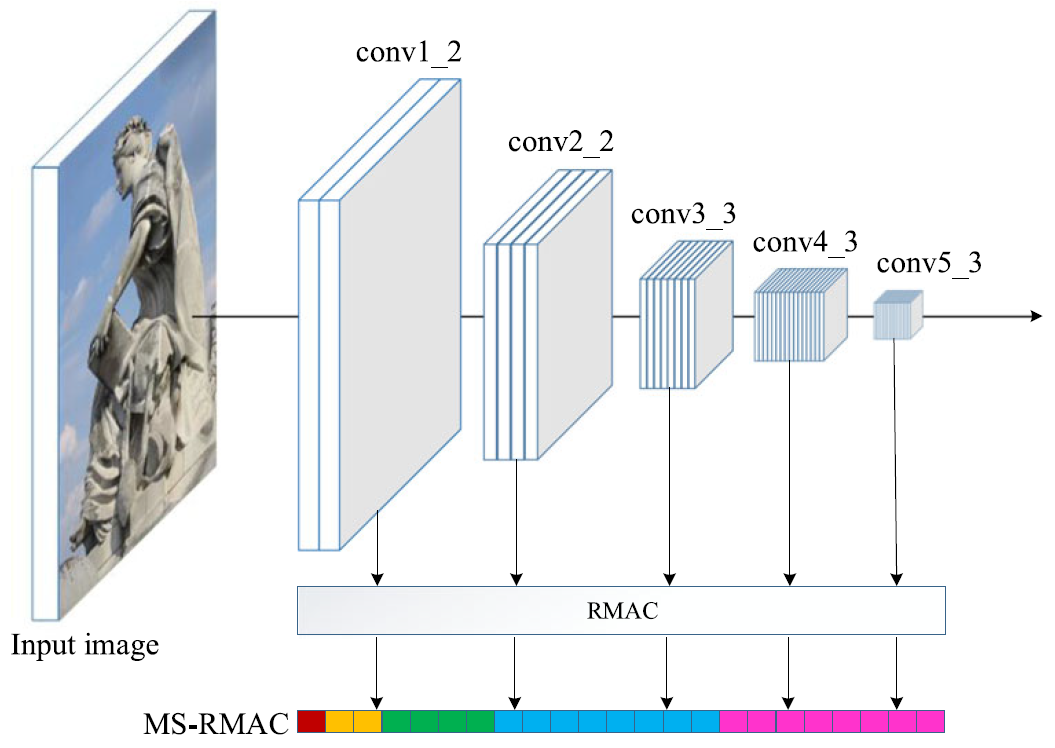
- Firstly, resize the input image to different quantized sizes and calculate the normed gradients of each resized image.
- The values in an 8x8 region of these resized normed gradients maps are defined as a 64D normed gradients (NG) feature of its corresponding window.
- Learn a single model using linear SVM.
- NG features of the ground truth object windows and random sampled background windows are used as positive and negative training samples respectively.
- Learn coefficient and bias terms for each quantised size for objectness score
Experiments
Dataset
- PASCAL VOC2007 test set
- 4,952 images with bounding box annotation for the object instances from 20 categories
Metric
DR-#WIN
- DR-#WIN means detection rate (DR) given #WIN proposals. An object is considered as being covered by a proposal if the strict PASCAL criterion is satisfied. That is, the INT-UION score is no less than 0.5.
- Refer: BING: Binarized Normed Gradients for Objectness Estimation at 300fps
DR-#WIN curves
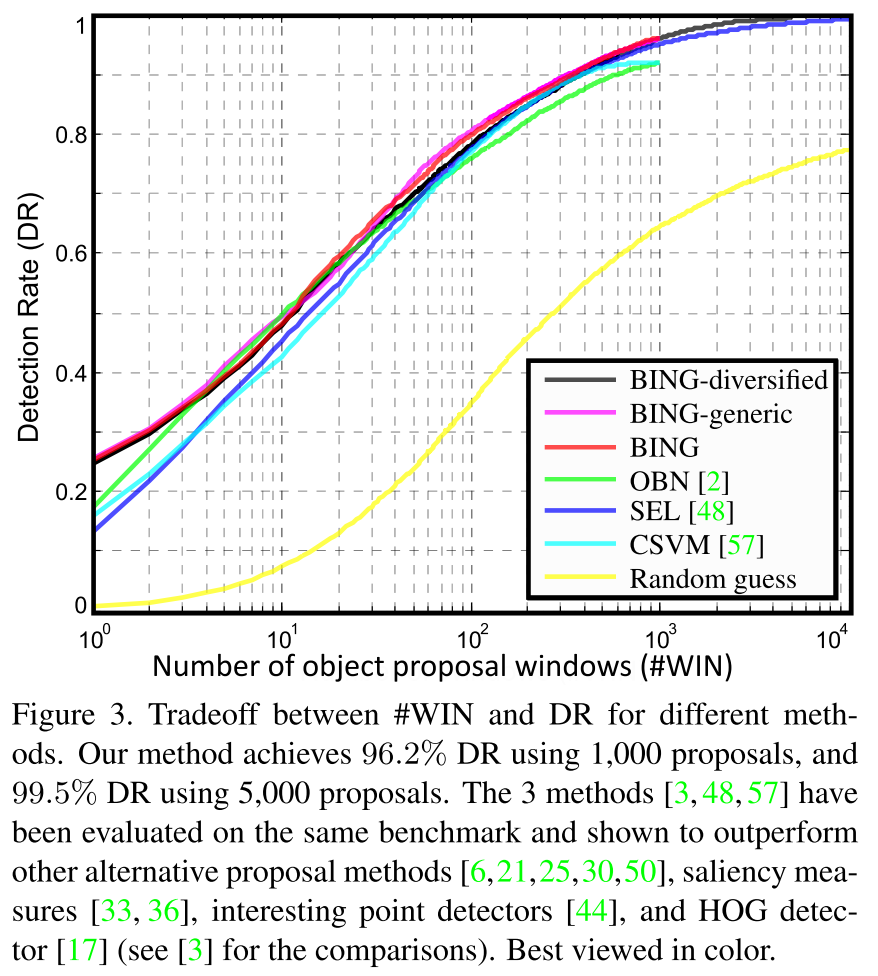
- Performance is evaluated with curves measuring the detection-rate vs number of windows (DR-#WIN).
- #WIN is the number of windows output by the algorithm being evaluated.
- DR is the percentage of ground-truth objects covered by those windows.
- An object is considered covered by a window if the strict PASCAL-overlap criterion is satisfied (intersection-over-union(INT-UION) > 0.5).
-
For comparing methods, we summarize a DR-#WIN curve with a single value: the area under the curve (AUC), after renormalizing the horizontal axis from [0, 1000] to [0,1], so the AUC ranges in [0,1].
- Refer: Measuring the objectness of image windows
Experimental Evaluation
Proposal quality comparisons
- BING achieves 99.5% DR using only 5,000 proposals by simply collecting the results from 3 color spaces (BING-diversified): RGB, HSV, and GRAY.
Generalize ability test
- BING are generic over categories by testing BING on images containing objects whose categories are not used for training.
- Specifically, we train BING using 6 object categories and test it using the rest 14 categories.
- The statistics for training and testing on same or different object categories are represented by BING and BING-generic, respectively.
- Both are almost identical, which demonstrates the generalize ability of our proposals.
Computational Time
Qualitative Analysis

Quantitative Analysis