Faster R-CNN is an object detecting network proposed in 2015, and achieved state-of-the-art accuracy on several object detection competitions.
Introduction
Summary
- Problem Statement
- Even though SPPnet and Fast R-CNN have reduced the running time of object detection networks, they have region proposal computation as a bottleneck.
- Research Objective
- To improve object detection networks in terms of speed and accuracy
- Solution Proposed: Faster R-CNN
- Faster R-CNN is a single network of combination of RPN and Fast R-CNN by sharing their convolutional features.
- Introduce a Region Proposal Network (RPN) that shares full-image convolutional features with the detection network to get cost-free region proposals.
- Contribution
- For the very deep VGG-16 model, proposed detection system has a frame rate of 5fps on a GPU.
- Achieved state-of-the-art object detection accuracy on PASCAL VOC 2007, 2012, and MS COCO datasets with only 300 proposals per image.
- In ILSVRC and COCO 2015 competitions, Faster R-CNN and RPN are the foundations of the 1st-place winning entries in several tracks.
R-CNN Series
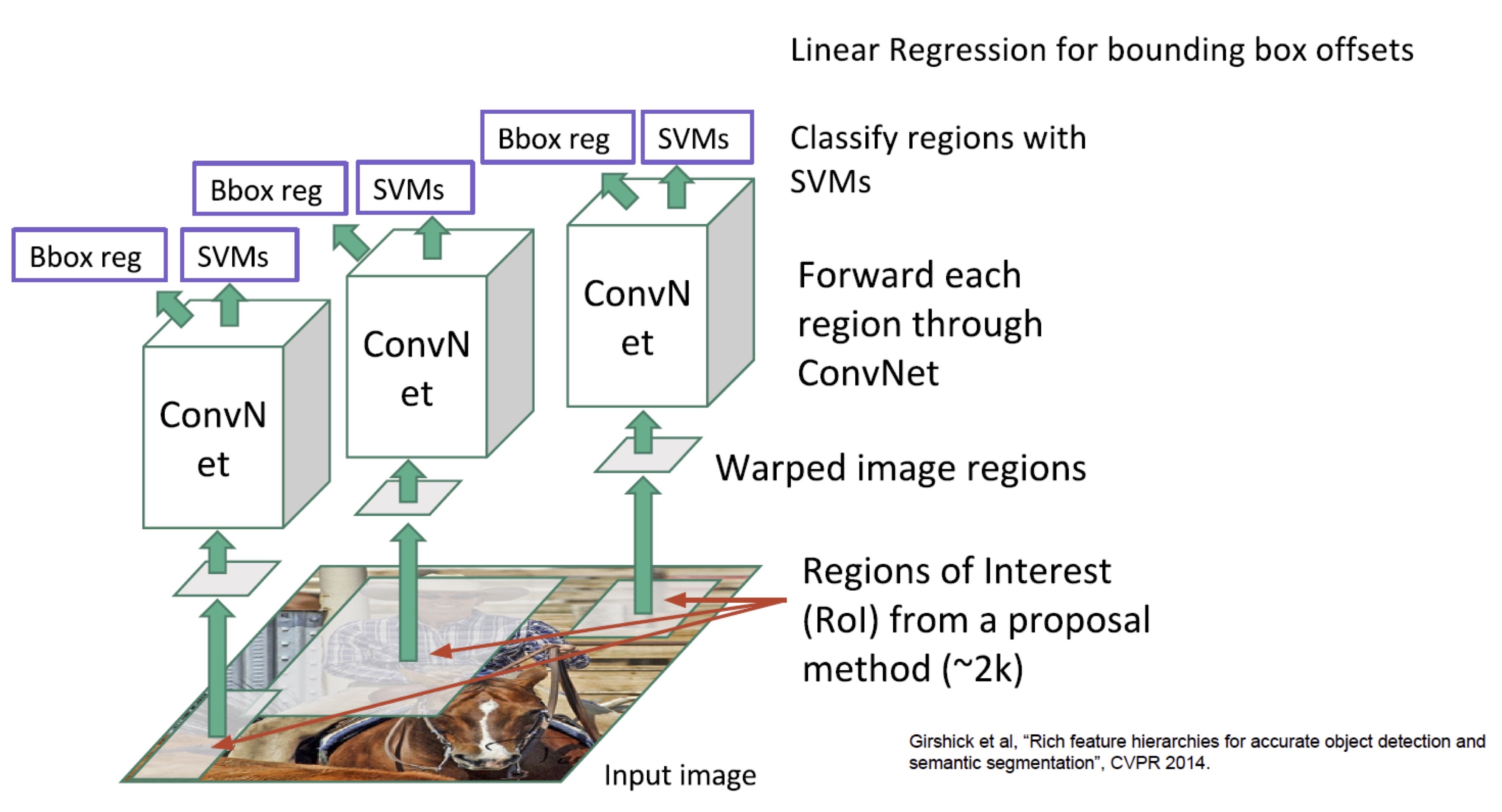
1) R-CNN: Rich feature hierarchies for accurate object detection and semantic segmentation (2013)
-
Region Proposals: Selective Search
- Training R-CNN
- Pre-train a CNN(AlexNet) for ImageNet classification dataset
- Fine-tune for object detection (softmax + log loss)
- Cache feature vectors to disk
- Train post hoc (parameters learned after CNN is fixed) linear SVM (hinge loss)
- Train post hoc linear bounding-box regressors (squared loss)
- Bounding-Box Regression
- Train a linear regression classifier that will output some correction factor
- Problem of R-CNN
- Slow at test-time: need to run full forward path of CNN for each region proposal
- Takes 13s/image on a GPU (K40) and 53s/image on a CPU while testing
- SVM and regressors are post-hoc: CNN features are not updated in response to SVMs and regressors
- Complex multistage training pipeline (84 hours using K40 GPU)
- Fine-tune network with softmax classifier (log loss)
- Train post-hoc linear SVMs (hinge loss)
- Train post-hoc bounding-box regressions (squared loss)
- Slow at test-time: need to run full forward path of CNN for each region proposal
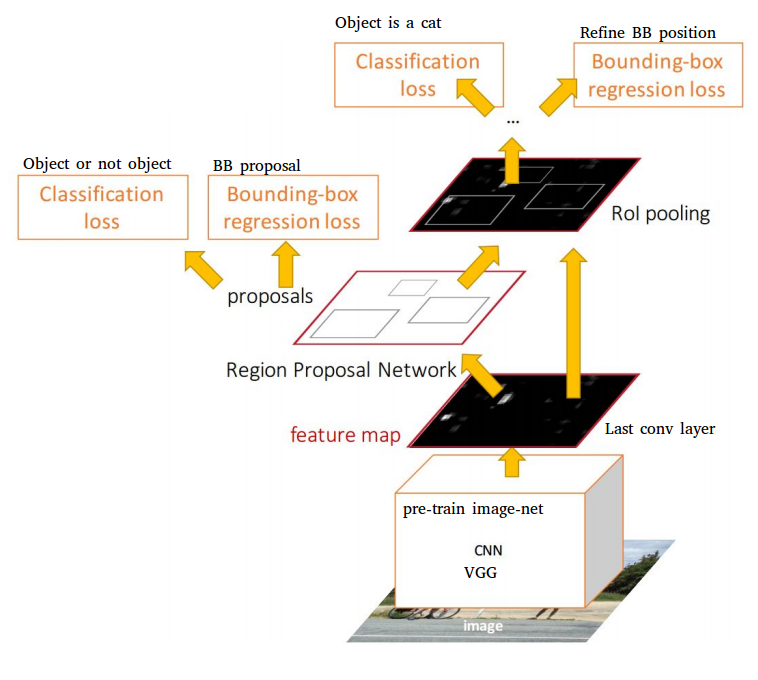
2) Fast R-CNN (2015)
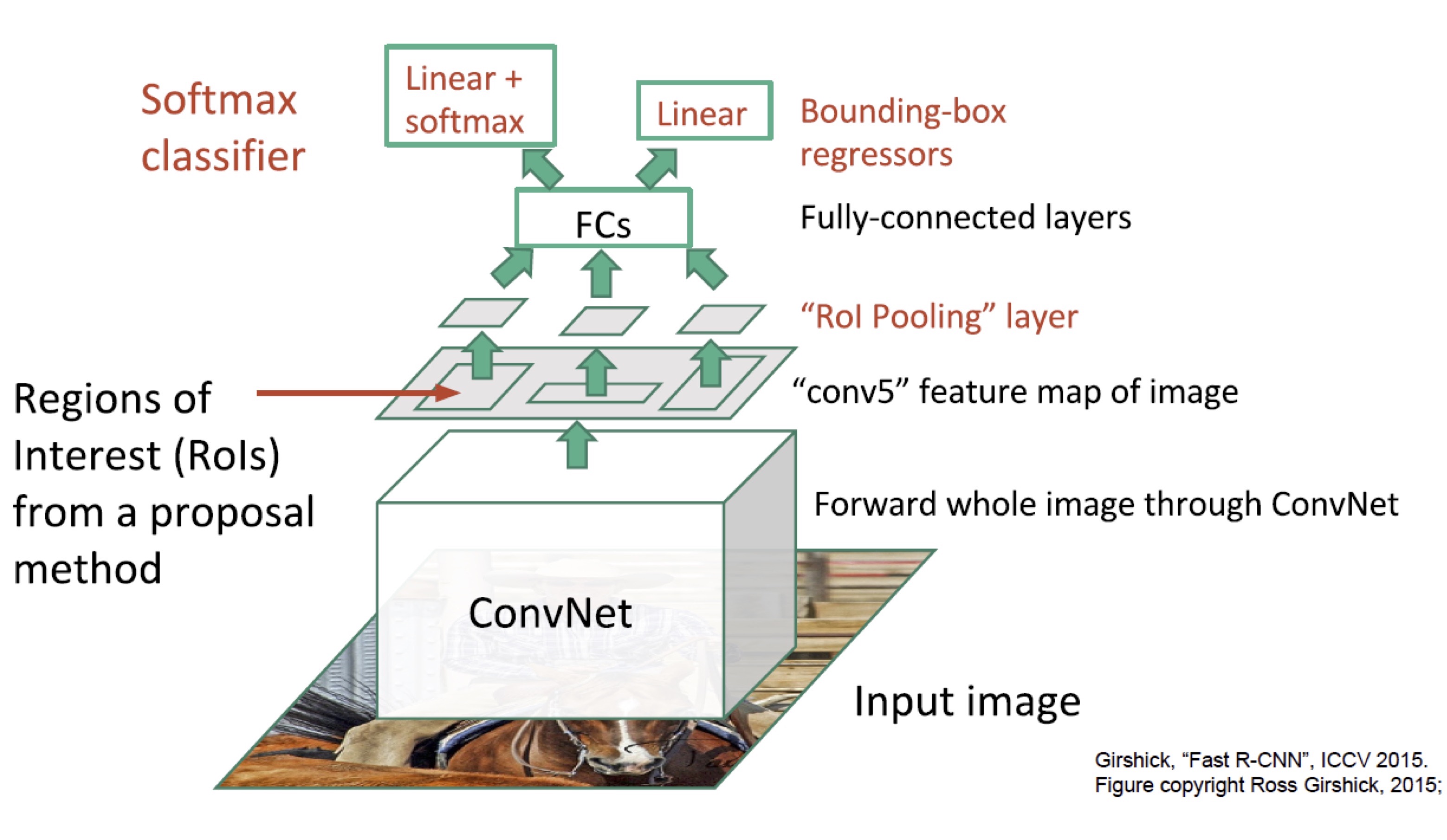
- Fast R-CNN improved drawbacks of R-CNN and SPP-net
- Train the detector in a single stage, end-to-end without caching features or post hoc training steps
- Train all layers of the network
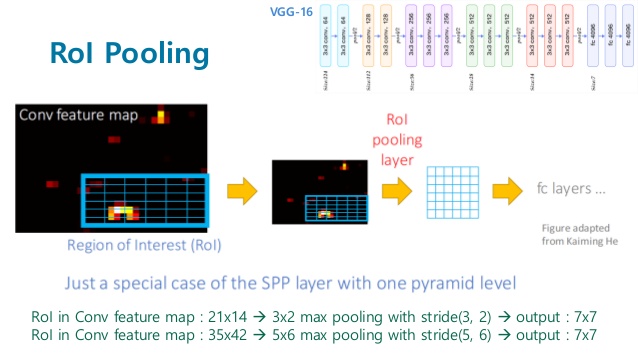
- RoI pooling
- It is a type of max-pooling with a pool size dependent on the input, so that the output always has the same size.
- Fully connected layer always expected the same input size.
- Problems of Fast R-CNN
- Still depends on external system to give the region proposals (selective search)
- It is computational bottleneck for test-time as the algorithm learns on CPU
3) Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks (2015)
4) Mask R-CNN (2017)
Speed Comparison of Object Detectors
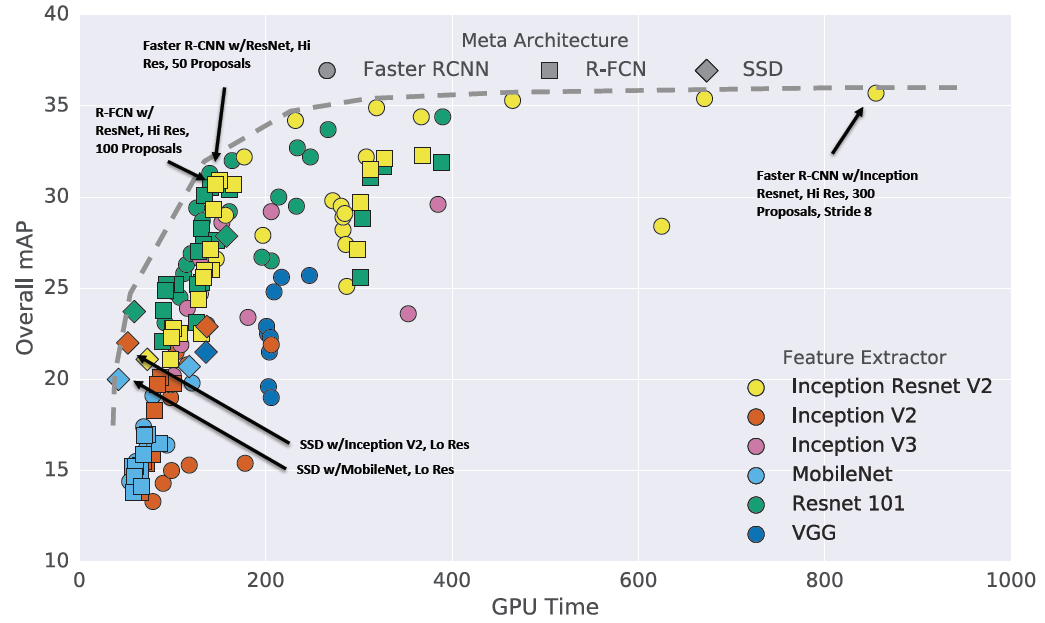
- Generally R-FCN and SSD models are faster on average while Faster R-CNN models are more accurate.
- Faster R-CNN models can be faster if we limit the number of regions proposed.
Faster R-CNN
- Faster R-CNN: RPN + Fast R-CNN
- Insert a Region Proposal Network (RPN) after the last convolutional layer using GPU
- RPN trained to produce region proposals directly
Region Proposal Network (RPN)
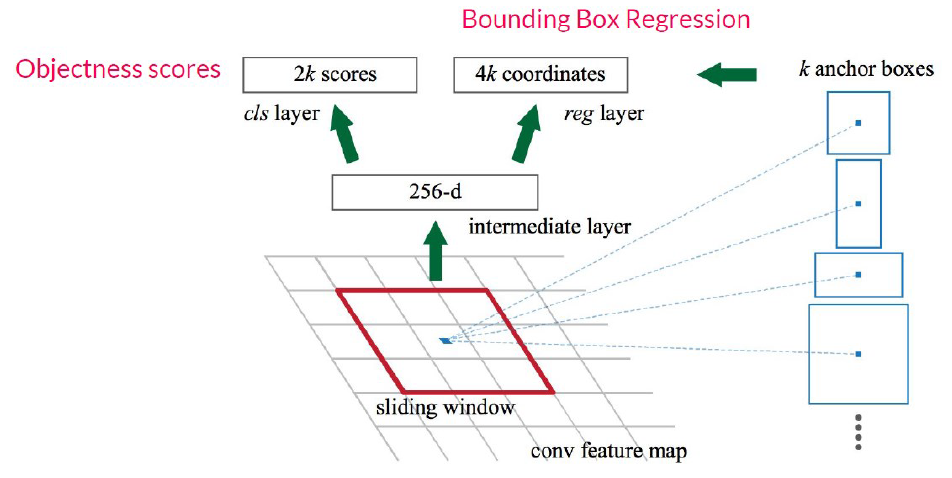
- RPN
- Slide a small window on the feature map
- Build a small network for classifying object or not-object and regressing bounding-box locations
- Position of the sliding window provides localization information with reference to the image
- Box regression provides finer localization information with reference to this sliding window
- Use k anchor boxes at each location as translation invariant
- Regression gives offsets from anchor boxes
- Classification gives the probability that each anchor shows an object
- Anchors: pre-defined reference boxes
- Multiple anchors are used at each position
- Each anchor has its own prediction function
- Single-scale features, multi-scale predictions
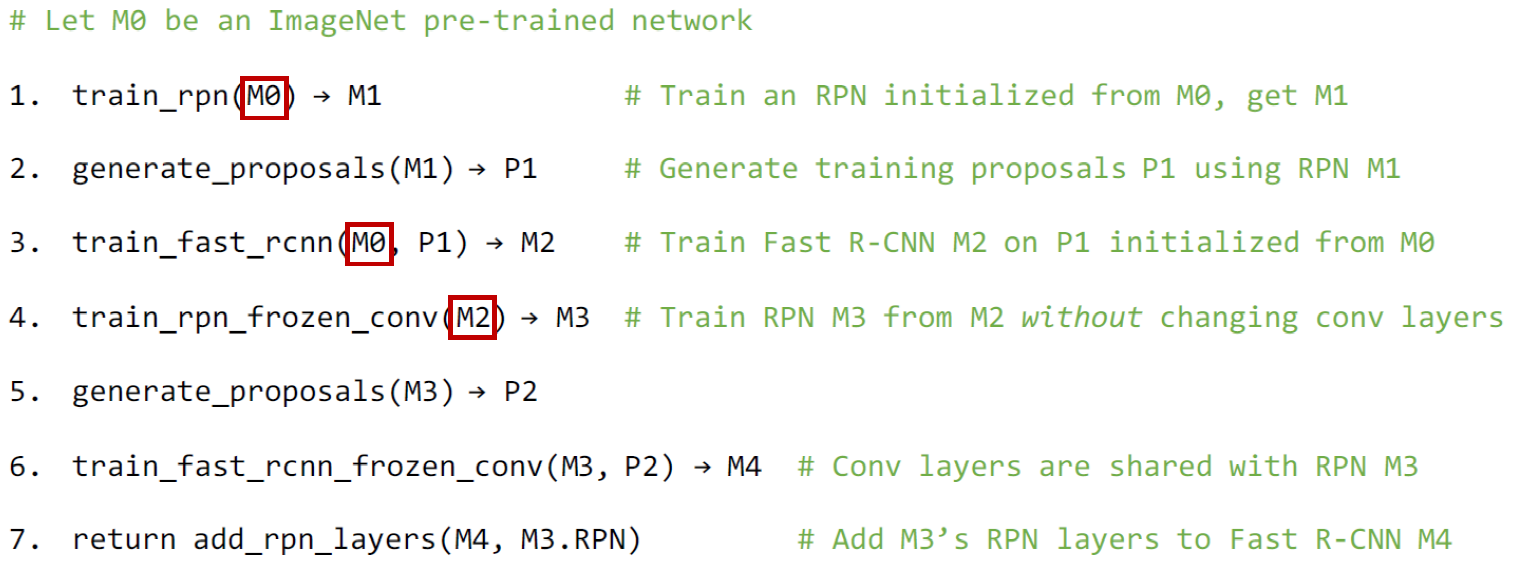
4- Step Alternating Training
Experiments
-
Speed Comparision
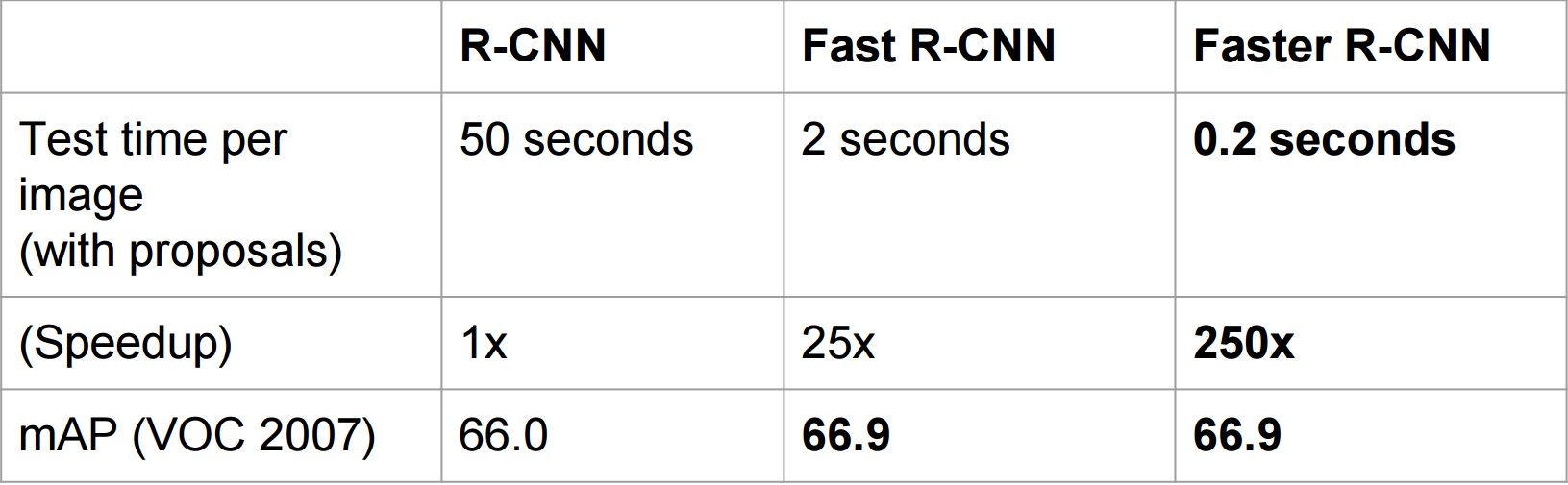
-
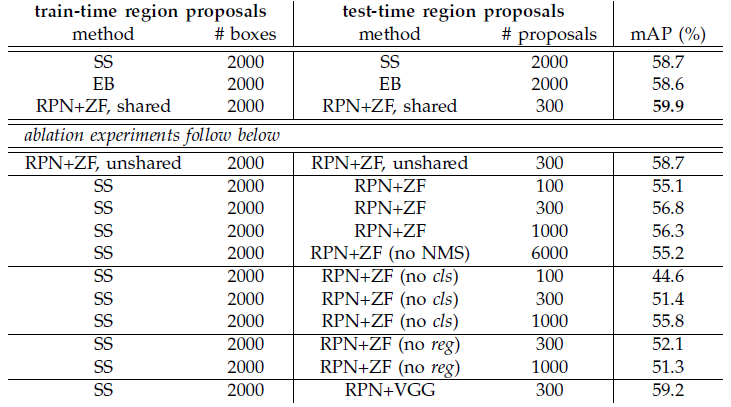
Detection results on PASCAL VOC 2007 test set
- Using RPN yields a much faster detection system than using either SS or EB because of shared convolutional computations
- Timing (ms) on a K40 GPU, except SS proposal is evaluated in a CPU
- Using RPN gives a much faster running time of the entire object detection system.

- Problem of Faster R-CNN
- RoI pooling has quantization operations which can cause misalignments between the RoI and the extracted features
- Even though this would not impact classification, it can make a negative effect on predicting bounding box



